Holosoma
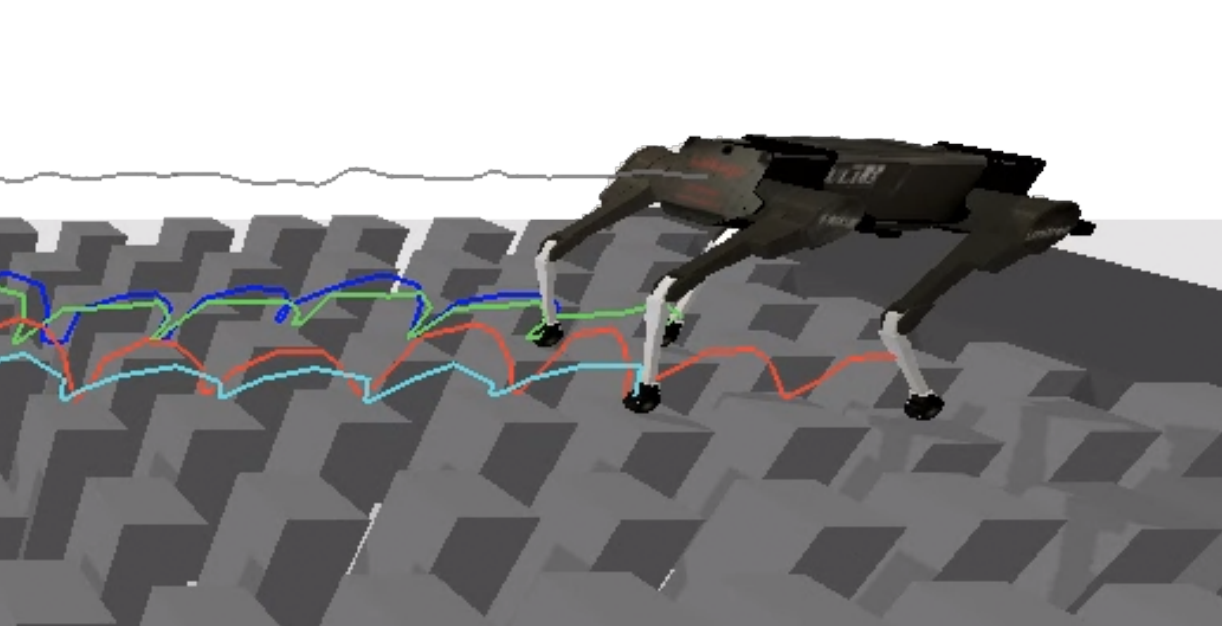
Comprehensive humanoid robotics framework for training and deploying reinforcement learning policies on humanoid robots, as well as motion retargeting. Supports locomotion (velocity tracking) and whole-body tracking tasks across multiple simulators (IsaacGym, IsaacSim, MJWarp, MuJoCo) with algorithms like PPO and FastSAC