
Publication info
-
 Robotics Proceedings 2022Best Systems Paper Award,
Robotics Proceedings 2022Best Systems Paper Award,(1.6%)
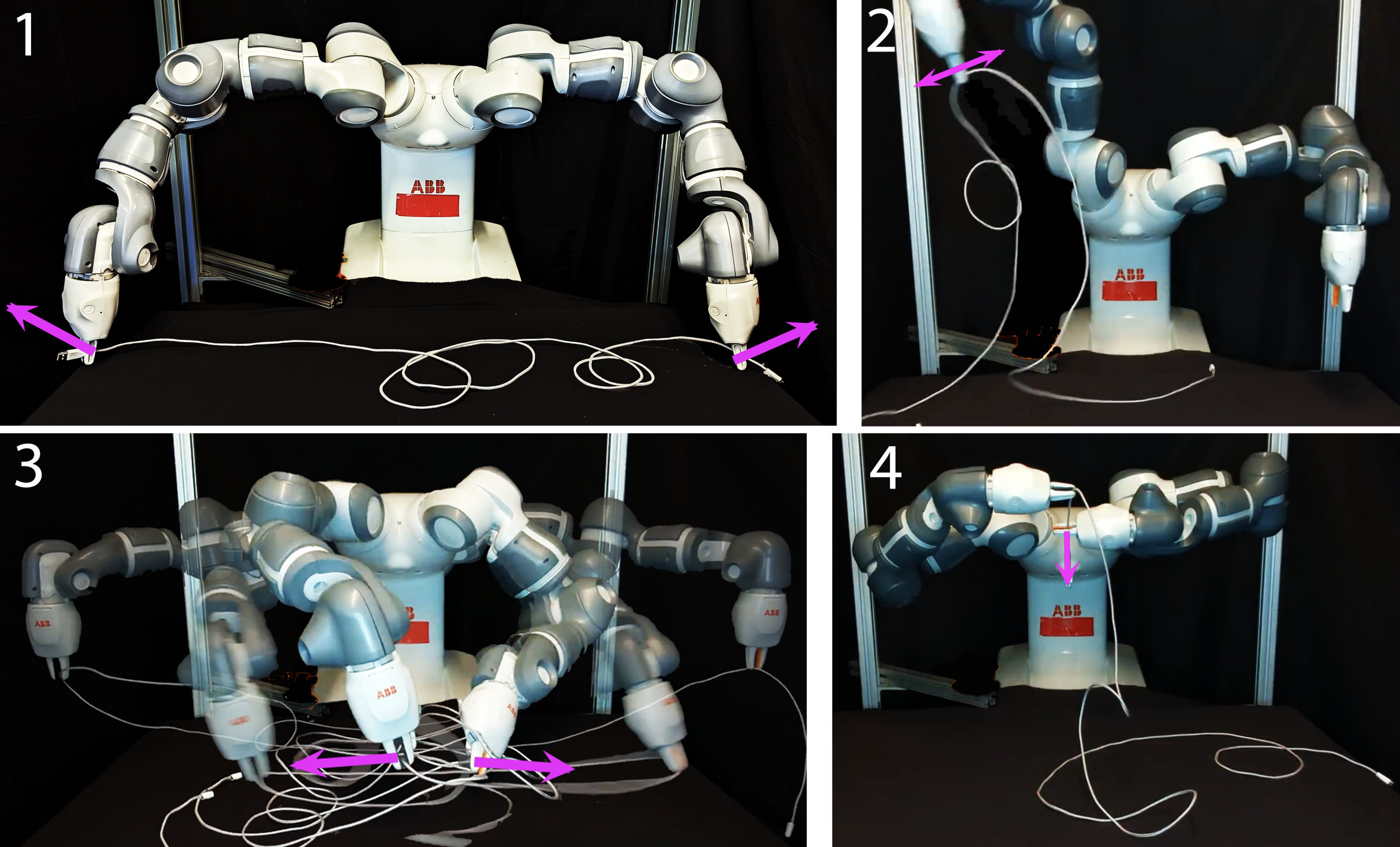
Sliding and Grasping for Tangle Manipulation (SGTM)
The following video briefly summarizes the SGTM algorithm. Our RSS spotlight provides a more detailed explanation of the algorithm, and discusses interesting experimental evaluations.
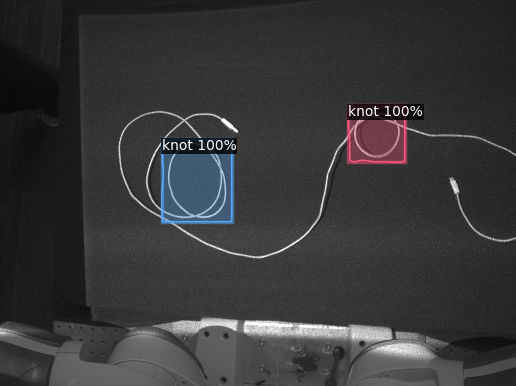
Knot Detection











RSS 2021 Spotlight
Acknowledgements
This research was performed at the AUTOLAB at UC Berkeley in affiliation with the Berkeley AI Research (BAIR) Lab, the CITRIS “People and Robots” (CPAR) Initiative, and the RealTime Intelligent Secure Execution (RISE) Lab. The authors were supported in part by donations from Toyota Research Institute and by equipment grants from PhotoNeo, Nvidia, and Intuitive Surgical.
How to cite
-
@article{Viswanath22RSS_SGTM, title = {Autonomously Untangling Long Cables}, author = {Viswanath, Vainavi and Shivakumar, Kaushik and Kerr, Justin and Thananjeyan, Brijen and Novoseller, Ellen and Ichnowski, Jeffrey and Escontrela, Alejandro and Laskey, Michael and Gonzalez, Joseph E. and Goldberg, Ken}, journal = {Robotics Proceedings}, year = {2022}, url = {https://roboticsconference.org/2022/program/papers/034/}, }